
SUPERCONDUCTIVITY COMMUNICATIONS, Vol.18, No4, August, 2009
超電導リニアの開発が旧国鉄によって1962年(昭和37年)に開始されてから、50年近くが経過しました。去る7月28日には、国土交通省の実用技術評価委員会において、「超高速大量輸送システムとして運用面も含めた実用化の技術の確立の見通しが得られており、営業線に必要となる技術が網羅的、体系的に整備された」との評価を得るに至りました。本稿では、超電導リニアのこれまでの歩みを振り返り、開発の意義などについて考えてみます。
1962年は東海道新幹線開業の2年前に当たります。東海道新幹線はそれまでの在来線特急の最高速度の約2倍に当たる時速210 kmを目標として開発が進められていましたが、その過程で在来方式鉄道の高速化の限界も見えてきていました。ひとつは車両に電力を供給するための「集電」に関わる問題、もうひとつは鉄車輪が鉄レールの上を転動し、ころがり摩擦力、すなわち「粘着」力に頼って加減速する方式に関わる問題です。
電気鉄道を高速化するには、地上側の架線に接触させた車両のパンタグラフを通じて、車両に大電力を供給する必要がありますが、車両が高速走行すると、架線に発生する振動によって離線(架線とパンタグラフが離れること)が多発し電力供給が思うように行かなくなります。また高速走行時、とりわけ雨天時には、鉄車輪と鉄レールとの間でスリップが生じやすくなり、加速力やブレーキ力が減少します。さらに沿線環境保全の観点からは、高速化に伴ってパンタグラフや車輪から発生する騒音や、線路の振動が増大してしまうことも大きな障害です。
これらの限界を、「車両を浮上走行させる」ことで克服し、新幹線の約2倍の時速500 kmで東京〜大阪間を1時間で結ぼう、というのが、最初のそして現在も変わらぬ超電導リニアのコンセプトです。まず車両に電力供給することなく、地上側から車両を加減速できる地上一次リニアモーターの採用によって、「集電」の問題が解決できます。ここから「リニアモーターカー」の愛称が生まれました。一方、「粘着」の問題の解決に必要な「浮上」については、暫く磁気浮上を初めとする様々な方式について検討されましたが、1966年に発表された米・Brookhaven国立研究所のPowell,Danby両博士による超電導磁気浮上・推進に関する論文をきっかけとして、1970年から旧国鉄において超電導磁気浮上の研究を開始することになりました。この判断の決め手となったのは、日本の軟弱地盤や地震への対応です。すなわち、地上と車両との空隙(浮上高さ)を充分に大きくすることが必要条件であると判断し、技術的難易度が高いことを承知の上で、10
cmの浮上が可能な超電導磁気浮上に取り組むことになりました。ここで超電導リニアのコンセプトが固まりました。ちなみに同時期、ドイツにおいても超電導リニアの研究が行われ、1975年にはSiemensなどがErlangenの円形実験軌道で時速230
kmを記録していましたが、技術的および経済的な観点から、超電導方式ではなく常電導電磁石によるシステムの開発を選択し、トランスラピッドシステムとなりました。
その後の経過を簡単に辿りますと、超電導磁石開発着手の2年後、1972年(1962年から10年後)には早くもML100車両により、超電導磁気浮上+リニアモーター推進による走行試験に成功し、続いて1977年(同15年後)には宮崎実験線でML500車両による走行実験が開始され、2年後には最高時速517kmを達成しました。宮崎実験線は超電導リニアによる時速500km走行の可能性実証のための、いわば基礎実験線ですので、次のステップとして実用技術完成のための実用試験線のフェーズが必要となるのですが、旧国鉄の経営悪化や分割民営化があって次に進むことができず、宮崎実験線での実験が約20年間続きました。そしてJR発足後、実用試験線である山梨実験線の建設が始まり、1997年(同35年後)にMLX01車両による走行試験開始となります。その後の技術開発は加速しつつ順調に進み、2008年の山梨実験線延伸工事着手や東海道新幹線バイパス計画に繋がっていきました。
このように、停滞の時期もありましたが、システムのコンセプトを変えることなく首尾一貫して技術開発が進められ、超電導リニア技術は完成の域に到達しました。これは、開発当初に技術陣が構築した基本コンセプトが優れていたことと、これまでのさまざまな困難を乗り越えてきた多くの技術者の努力の成果であると言えます。
それでは日本が、困難と思われた超電導技術の採用にこだわり、そしてその技術を完成させたことにはどのくらいの価値があったのでしょうか? トランスラピッドシステムとの比較を表にしてみます。
磁気浮上+リニアモーター推進という基本コンセプトは同一であり、違いは車上搭載磁石が超電導か常電導か、ということですが、システムのパフォーマンスには大きな違いができました。最高速度、大量輸送能力、省エネルギー性、沿線環境保全性能などは超電導と常電導の違いによる性能差です。これらの性能は新幹線と同様の役割を担う進化形の鉄道として具備すべき必須項目であり、逆に言うと、超電導方式でなかったらリニアは東海道新幹線バイパスには使えなかった、ということができます。
ML100(1972年)

ML500(1977年)

MLX01(1997年)

MLX01改良型(2009年)
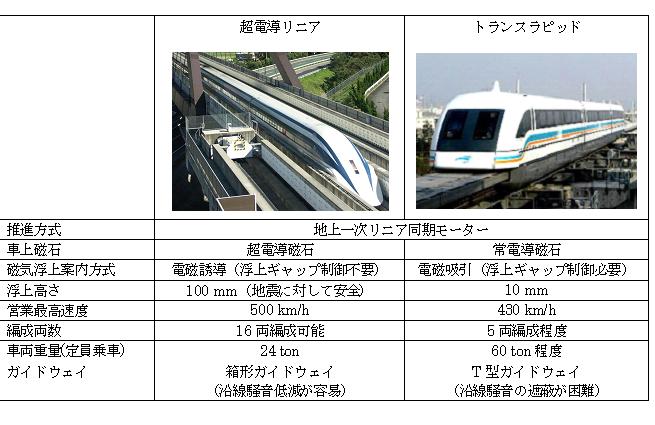
表、超電導リニア、トランスラピッドシステムの比較
JR東海では現在、山梨実験線の更新・延伸工事に取り組んでいます。これは、実験線延長を現在の18.4 kmから42.8 kmに延伸するとともに、主に電気設備を長大編成に対応可能なものに更新する工事で、最大12両編成が長距離走行できる仕様とし、一段と高い技術レベルへの磨き上げを行うものです。また同時に超電導リニアによる東海道新幹線バイパス(法律上は中央新幹線)の、自己負担による建設を目指して準備を進めています。具体的には、中央新幹線に想定されるルート上の地形地質に関する調査報告を昨年10月に行い、現在は法律に定められた、建設費用や技術開発などに関する残りの調査を実施中です。これらの調査が終了すると建設の指示に向けた準備が整うことになります。東海道新幹線バイパスの第一局面である、首都圏〜中京圏間での営業運転開始目標は2025年(平成37年)です。この年は超電導リニア開発開始から63年後、英国での鉄道営業運転開始から数えて200周年に当たります。長期間にわたる、また民間の事業としては前例のない規模のプロジェクトですが、超電導リニア営業線完成という目標に向けて、今後も着実に取り組みを進めていくことにしています。 (JR東海 寺井元昭)
<事務局注: SUPERCOM 200号刊行より少し早く超電導リニアが開業する予定です。>